
ພະແນກຄວາມຮັບຜິດຊອບສໍາລັບແຮງບິດ fastener
1. PATAC ຮັບຜິດຊອບສໍາລັບການປ່ອຍ torque dynamic ແລະ torque static ເບື້ອງຕົ້ນ.PATAC ປ່ອຍມາດຕະຖານແຮງບິດແບບເຄື່ອນໄຫວຕາມຄວາມຕ້ອງການຂອງການອອກແບບ, ສົມທົບກັບຜົນການທົດລອງແລະຜົນການທົດສອບເສັ້ນທາງ.
2. ME ຮັບຜິດຊອບສໍາລັບການປ່ອຍແຮງບິດສະຖິດຕາມແຮງບິດແບບເຄື່ອນໄຫວທີ່ປ່ອຍອອກມາໂດຍ PATAC, ແຮງບິດຂອງເຄື່ອງມື fastening ໄດ້ຖືກປັບໃນມູນຄ່າ Nominal ຂອງມາດຕະຖານແຮງບິດແບບເຄື່ອນໄຫວໃນສາຍການຜະລິດ.ຫຼັງຈາກນັ້ນ, ແຮງບິດສະຖິດແມ່ນຖືກວັດແທກຕາມຮູບແບບການຜະລິດປົກກະຕິ.ການນໍາໃຊ້ວິທີການສະຖິຕິ (30 ຊຸດຂໍ້ມູນ), ນາມສະກຸນແລະຄວາມທົນທານຂອງມາດຕະຖານ torque static ແມ່ນໄດ້ຮັບ, ແລະມາດຕະຖານ torque static ແມ່ນໄດ້ຮັບ.
ຮູບແບບການຂຽນແຮງບິດແບບໄດນາມິກ ແລະ ແຮງບິດສະຖິດ
1. ແຮງບິດແບບເຄື່ອນໄຫວ
D nominal+/- ຄວາມທົນທານ NM ;ແຮງບິດແບບໄດນາມິກແມ່ນຂຽນໃນຮູບແບບຂອງນາມສະກຸນ +/ຄວາມທົນທານເຊັ່ນ D30+/-5nm;ບໍ່ມີຊ່ອງຫວ່າງລະຫວ່າງ D ແລະ 30+/-5NM; ບ່ອນທີ່ D ຫຍໍ້ມາຈາກ Dynamic;NM ແມ່ນຫົວໜ່ວຍຂອງແຮງບິດ: ນິວຕັນ.ແມັດ;ຄວາມທົນທານຄວນຈະເປັນຄວາມທົນທານ symmetrical ແລະບໍ່ຄວນຖືກກໍານົດເປັນຮູບແບບຂອງຄວາມທົນທານບໍ່ສົມມາດຂຶ້ນແລະລົງ.ສໍາລັບຕົວຢ່າງ, D30 + 3/-5NM ບໍ່ຖືກຕ້ອງ. ໃນການຜະລິດ, ມູນຄ່າແຮງບິດແບບເຄື່ອນໄຫວຂອງເຄື່ອງມື fastening ຄວນຈະເປັນນາມ, ແລະບໍ່ຄວນຈະຖືກ deviated ຈາກມູນຄ່ານາມໂດຍເຈດຕະນາ;
2. ແຮງບິດຄົງທີ່
SA-BNM;ປັດຈຸບັນ static ຄວນຖືກຂຽນເປັນຂອບເຂດຂອງຮູບແບບເຊັ່ນ: S25-35NM;ບໍ່ມີຊ່ອງຫວ່າງລະຫວ່າງ S ແລະ 25-30NM;ບ່ອນທີ່ S ຫຍໍ້ມາຈາກ Static;A ເປັນຕົວແທນຂອງຂອບເຂດຈໍາກັດຕ່ໍາຂອງແຮງບິດສະຖິດ, B ເປັນຕົວແທນຂອງຂອບເຂດຈໍາກັດເທິງຂອງແຮງບິດສະຖິດ;NM ແມ່ນຫົວໜ່ວຍຂອງແຮງບິດ: ນິວຕັນ.ແມັດ;
ຮູບແບບການຂຽນແຮງບິດແບບໄດນາມິກ ແລະ ແຮງບິດສະຖິດ
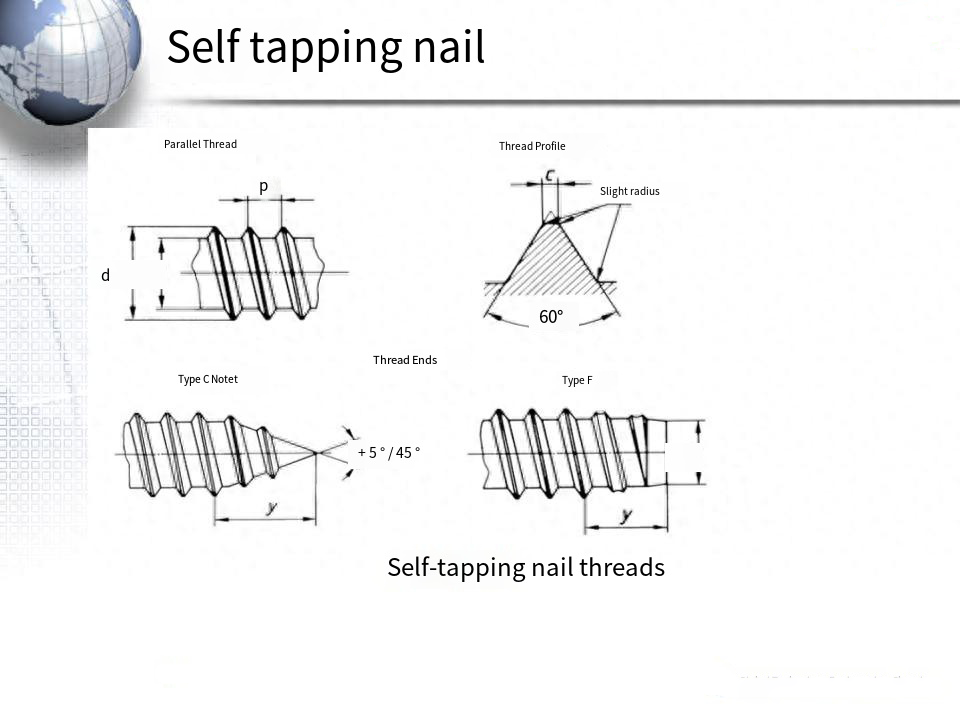
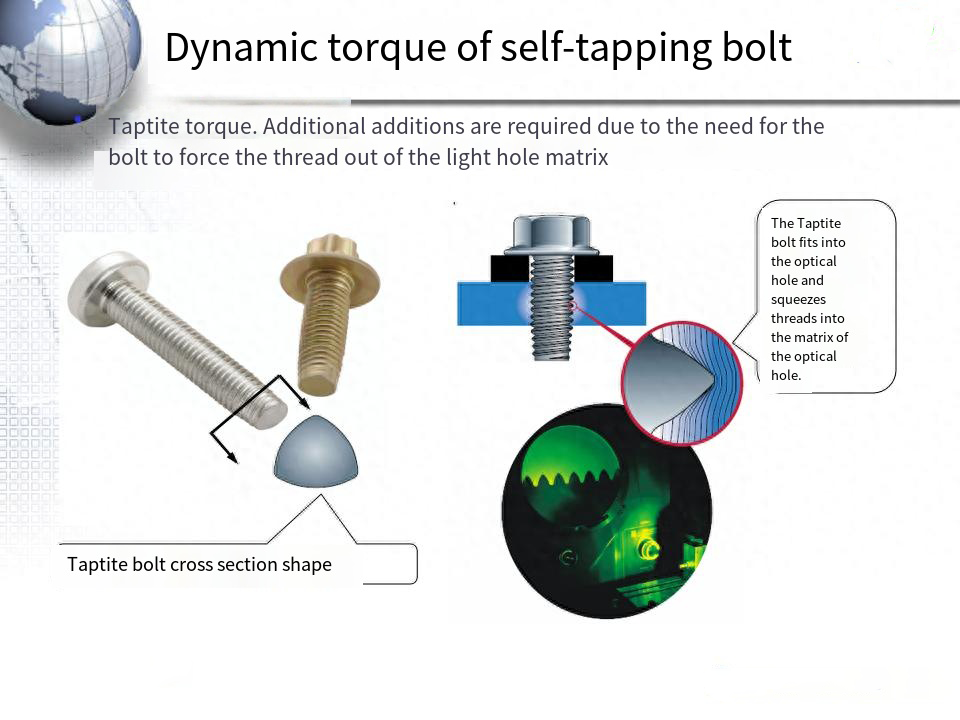
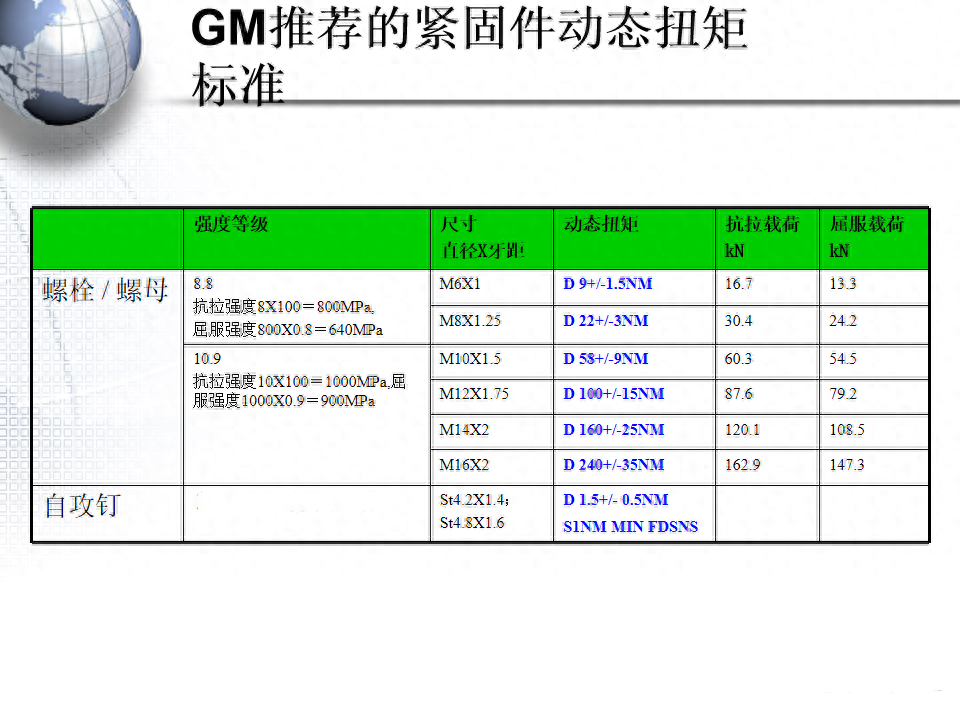
3. ແຮງບິດແບບໄດນາມິກຂອງຕະປູທີ່ນັ່ງດ້ວຍຕົນເອງ ເລັບທີ່ນັ່ງດ້ວຍຕົນເອງແມ່ນປົກກະຕິນັ່ງພາຍໃຕ້ມາດຕະຖານ FDSNS (Fully DrivenSeated Not Stripped).ຕົວຢ່າງ: D1.5+/-0.5NM S1NM MIN FDSNSWhere D stands for Dynamic(dynamic);ຕິດຕາມດ້ວຍຊ່ອງຫວ່າງ; 1.5+/-0.5NM ຊີ້ໃຫ້ເຫັນຂອບເຂດຂອງແຮງບິດແບບເຄື່ອນໄຫວ, 1.5NM ແມ່ນພຽງແຕ່ສໍາລັບການອ້າງອິງຂອງແຮງບິດທີ່ກໍານົດໄວ້ຕົວຈິງໃນການຜະລິດ, ແລະບໍ່ໄດ້ສະແດງອອກເປັນມູນຄ່າ Nominal.ແຮງບິດແບບເຄື່ອນໄຫວຕົວຈິງທີ່ໃຊ້ແມ່ນຖືກປັບໂດຍການຜະລິດຕາມສະຖານະການຕົວຈິງຂອງແຮງບິດຂອງປືນ, ແຕ່ຕ້ອງຮັບປະກັນວ່າມາດຕະຖານ FDSNS (Fullly Driven SeatedNot Stripped, ນັ້ນແມ່ນ, ແຂ້ວບໍ່ເລື່ອນ). ສຸດທ້າຍ, ໃຫ້ສັງເກດ FDSNS. (ຂັບເຄື່ອນຢ່າງເຕັມສ່ວນ NotStripped).
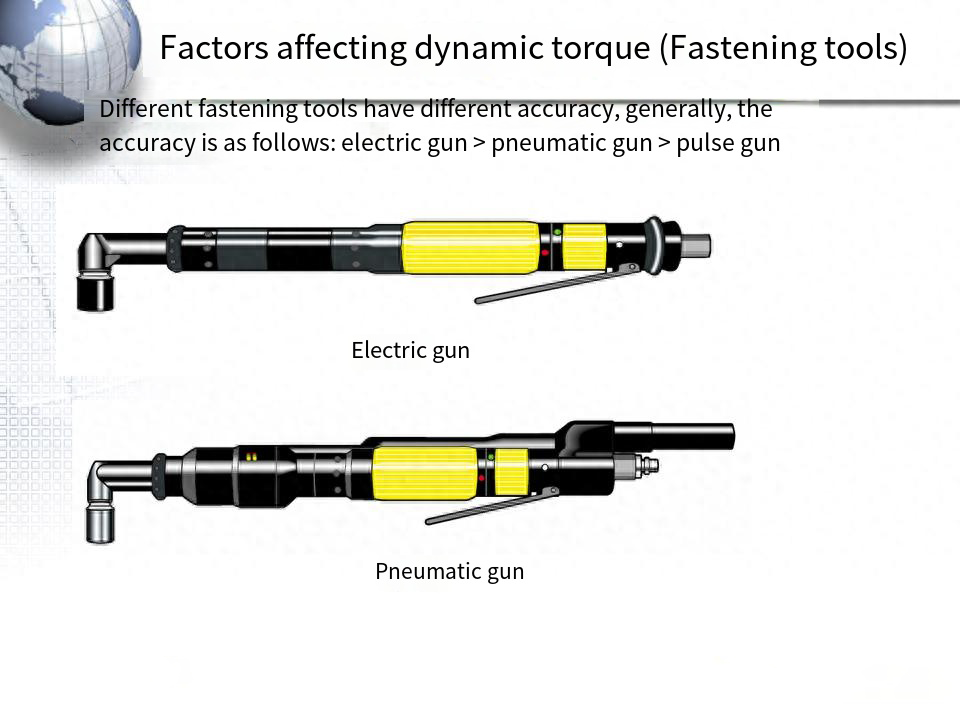
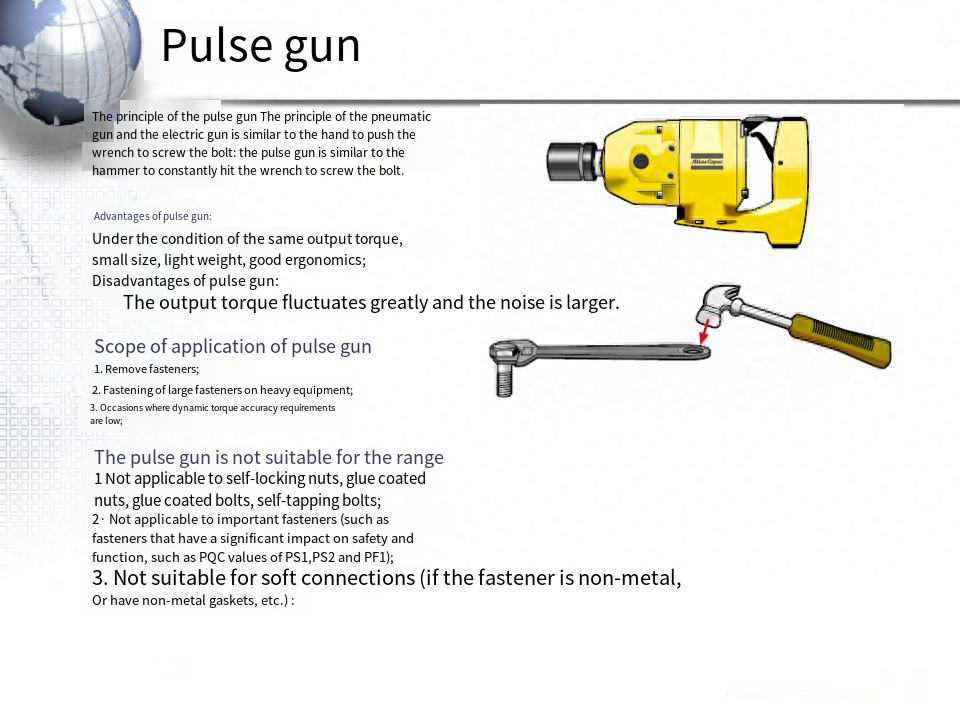
ປັດໃຈທີ່ສົ່ງຜົນກະທົບຕໍ່ແຮງບິດແບບເຄື່ອນໄຫວ
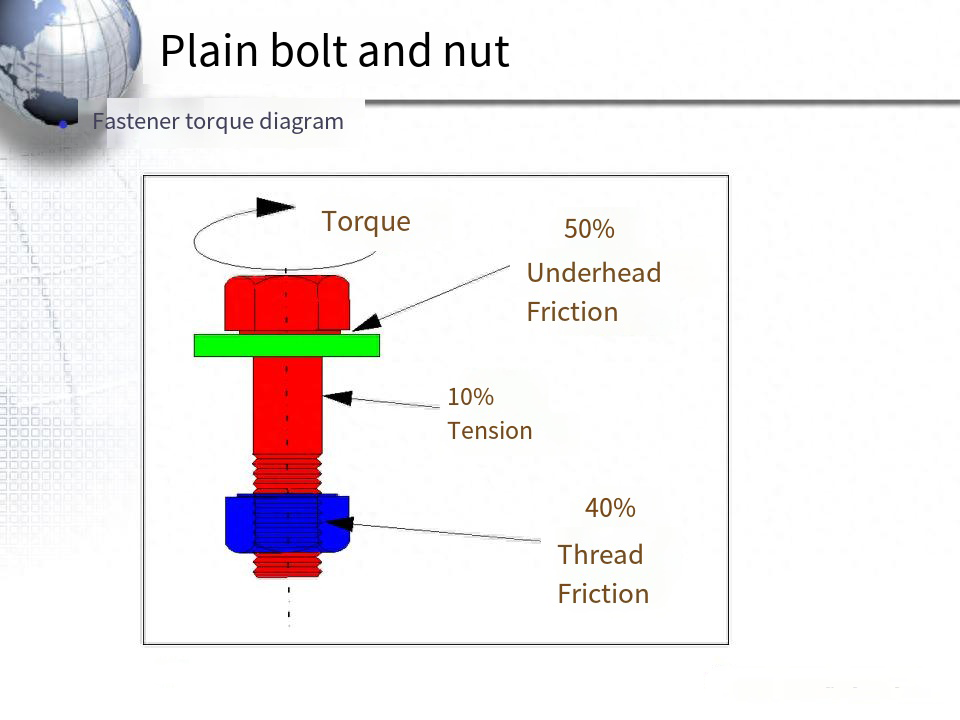
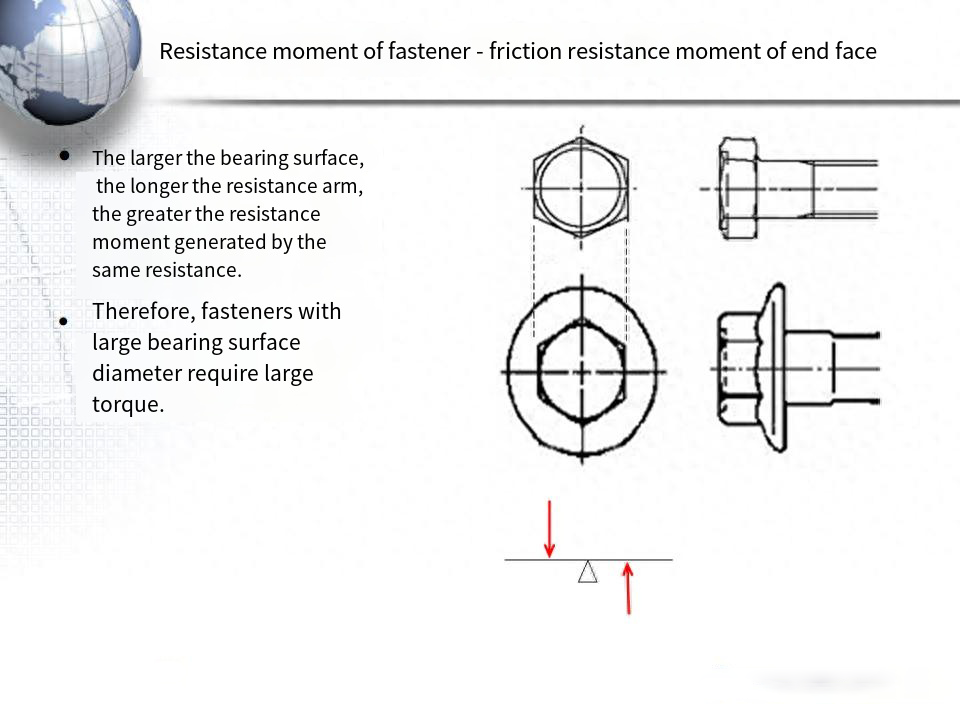
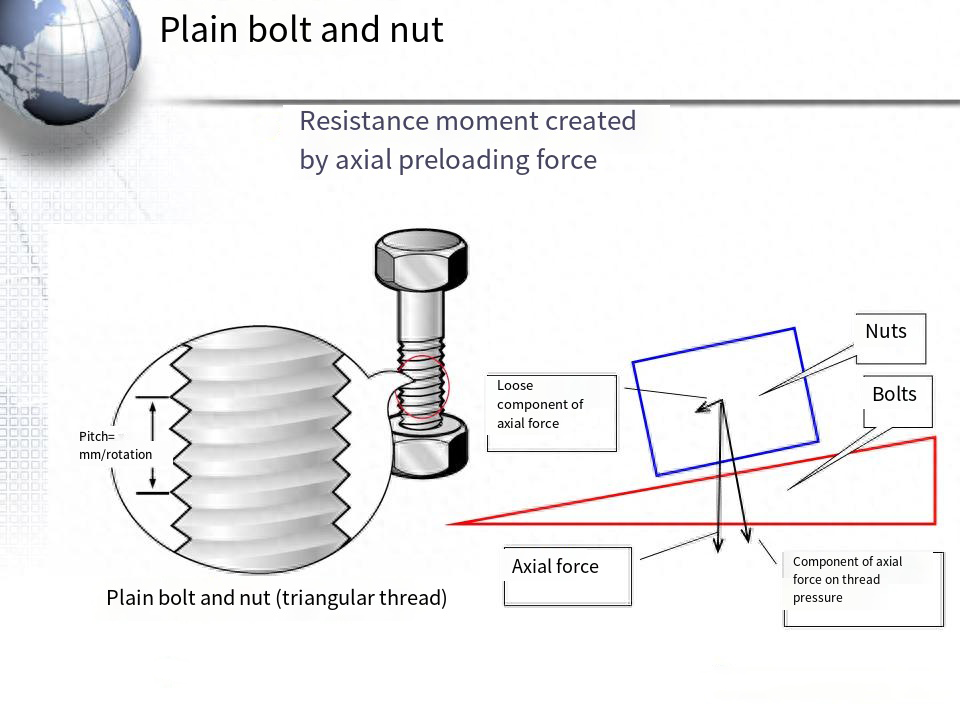
ໃນເວລາທີ່ກໍານົດ torque ແບບເຄື່ອນໄຫວ, ພິຈາລະນາບໍ່ພຽງແຕ່ fasteners, ແຕ່ຍັງ fasteners ແລະ fastener ເຄື່ອງມື. ແຮງບິດແບບເຄື່ອນໄຫວມີຂະຫນາດນ້ອຍເກີນໄປ, ເຊິ່ງງ່າຍທີ່ຈະເຮັດໃຫ້ເກີດການ loosening ແລະ fatigue fracture, ແລະບໍ່ສະດວກໃນການພັດທະນາທ່າແຮງຂອງ fasteners ໄດ້;ແຮງບິດແບບເຄື່ອນໄຫວມີຂະຫນາດໃຫຍ່ເກີນໄປ, ງ່າຍທີ່ຈະເຮັດໃຫ້ fasteners ຜົນຜະລິດ, ເຖິງແມ່ນແຕກ, ແຂ້ວເລື່ອນ, ແລະຖືກ crushed ໂດຍ fasteners. ຄວາມແຂງຂອງວັດສະດຸ, roughness ຂອງຫນ້າດິນ, ຄ່າສໍາປະສິດ friction ດ້ານແລະໂຄງສ້າງຂອງ fastener ຈະສົ່ງຜົນກະທົບຕໍ່ແຮງບິດເຄື່ອນໄຫວທີ່ຕ້ອງການ. .ໃນເວລາດຽວກັນ, ມັນຍັງຈໍາເປັນຕ້ອງໄດ້ພິຈາລະນາຄວາມເຂັ້ມແຂງຂອງ fastener ເພື່ອຮັບປະກັນວ່າມັນຈະບໍ່ຖືກປວດ, ແລະຫຼັງຈາກນັ້ນໄດ້ຮັບແຮງບິດສູງສຸດທີ່ fastener ສາມາດທົນໄດ້. ມາດຕະຖານແຮງບິດແບບເຄື່ອນໄຫວຈໍາເປັນຕ້ອງໄດ້ຖືກກໍານົດໂດຍທັງ fastener ແລະ. fastener.ແຮງບິດແບບເຄື່ອນໄຫວຕໍາ່ສຸດທີ່ຄວນໃຫ້ແນ່ໃຈວ່າມັນບໍ່ວ່າງໃນຂະບວນການຂອງການນໍາໃຊ້ຂອງລູກຄ້າ, ແລະແຮງບິດສູງສຸດຄວນຮັບປະກັນວ່າ fastener ແລະ fastener ບໍ່ລົ້ມເຫຼວ (ເຊັ່ນ: ຜົນຜະລິດ, breaking, slipping, crushing, deformation, ແລະອື່ນໆ). ເພື່ອເຮັດໃຫ້ການຫຼິ້ນຢ່າງເຕັມທີ່ກັບການປະຕິບັດຂອງ fasteners, preload axial ຂອງ fasteners ໂດຍທົ່ວໄປຄວນຈະເປັນ 50 ຫາ 75% ຂອງການຮັບປະກັນການໂຫຼດ fasteners.
ເວລາປະກາດ: ກັນຍາ-21-2023